продукт

Новый подход
к моделированию полей
к моделированию полей
Главная >> Применение >> Типовые примеры >>
датчик положения индуктивный, переменная индуктивность, датчик переменной индуктивности
Индуктивный датчик положения работает на принципе измерения электрического напряжения на резисторе в цепи с переменной индуктивностью, зависящей от взаимного положения компонент датчика.
Тип задачи:
Плоско-параллельная задача магнитного поля переменных токов .
Геометрия модели:
Дано
Количество витков в катушки N = 210,
Частота переменного напряжения f = 400 Гц,
Напряжение источника U = 24 В,
Нагрузочный резистор R = 1 Ом,
Воздушный зазор 0.1 - 0.6 мм.
Задание
Рассчитать напряжение на нагрузочном резисторе датчика в зависимости от величины воздушного зазора.
Решение
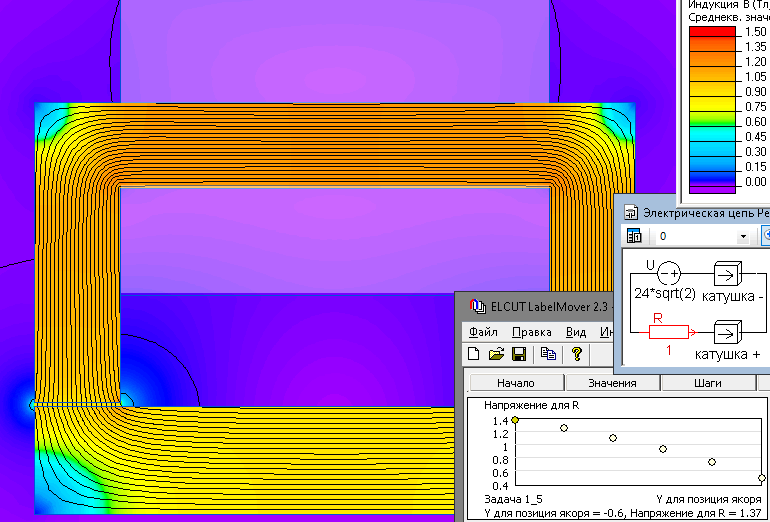
При изменении положения ротора изменяется индуктивное сопротивление катушки. Решается совместная задача магнитного поля переменных токов и электрической цепи. В электрической цепи следует задавать амплитудные значение напряжения источника, U*sqrt(2).
Для автоматизации расчетов используется надстройка LabelMover, которая двигает ротор с шагом 0.1 мм, решает задачи и находит падение напряжения на нагрузочном резисторе.
Результат
Распределение магнитной индукции, электрическая цепь с нагрузочным резистором и выходное напряжение для различных значений зазора.